ระบบสตาร์ทแบบนุ่มนวลทำเองสำหรับมอเตอร์ไฟฟ้า ไดอะแกรมไฟฟ้าฟรี การสตาร์ทวงจรมอเตอร์ไฟฟ้าแบบสับเปลี่ยนอย่างราบรื่น สตาร์ทเครื่องยนต์ได้อย่างราบรื่น
มอเตอร์ไฟฟ้าเป็นเครื่องจักรไฟฟ้าที่พบมากที่สุดในโลก ไม่ใช่องค์กรอุตสาหกรรมแห่งเดียว ไม่มีกระบวนการทางเทคโนโลยีเดียวที่สามารถทำได้หากไม่มีพวกเขา การหมุนของพัดลม, ปั๊ม, การเคลื่อนย้ายสายพานลำเลียง, การเคลื่อนย้ายของเครน - นี่เป็นรายการงานที่ไม่สมบูรณ์ แต่มีนัยสำคัญที่แก้ไขได้ด้วยความช่วยเหลือของเครื่องยนต์
อย่างไรก็ตามมีความแตกต่างกันเล็กน้อยในการทำงานของมอเตอร์ไฟฟ้าทั้งหมดโดยไม่มีข้อยกเว้น: ในขณะที่สตาร์ทมอเตอร์จะใช้กระแสไฟขนาดใหญ่ในช่วงสั้น ๆ เรียกว่ากระแสสตาร์ท
เมื่อใช้แรงดันไฟฟ้ากับขดลวดสเตเตอร์ ความเร็วในการหมุนของโรเตอร์จะเป็นศูนย์ ต้องขยับโรเตอร์และหมุนตามความเร็วที่กำหนด ซึ่งต้องใช้พลังงานมากกว่าที่จำเป็นสำหรับโหมดการทำงานปกติอย่างมาก
 ภายใต้โหลด กระแสไหลเข้าจะสูงกว่าขณะไม่ได้ใช้งาน ความต้านทานทางกลต่อการหมุนจากกลไกที่ขับเคลื่อนโดยเครื่องยนต์จะถูกเพิ่มเข้ากับน้ำหนักของโรเตอร์ ในทางปฏิบัติ พวกเขาพยายามลดอิทธิพลของปัจจัยนี้ให้เหลือน้อยที่สุด ตัวอย่างเช่น สำหรับพัดลมที่มีกำลังแรง แดมเปอร์ในท่ออากาศจะปิดโดยอัตโนมัติเมื่อสตาร์ทเครื่อง
ภายใต้โหลด กระแสไหลเข้าจะสูงกว่าขณะไม่ได้ใช้งาน ความต้านทานทางกลต่อการหมุนจากกลไกที่ขับเคลื่อนโดยเครื่องยนต์จะถูกเพิ่มเข้ากับน้ำหนักของโรเตอร์ ในทางปฏิบัติ พวกเขาพยายามลดอิทธิพลของปัจจัยนี้ให้เหลือน้อยที่สุด ตัวอย่างเช่น สำหรับพัดลมที่มีกำลังแรง แดมเปอร์ในท่ออากาศจะปิดโดยอัตโนมัติเมื่อสตาร์ทเครื่อง
ในขณะที่กระแสเริ่มต้นไหลจากเครือข่าย จะมีการใช้พลังงานจำนวนมากเพื่อนำมอเตอร์ไฟฟ้าเข้าสู่โหมดการทำงานปกติ ยิ่งมอเตอร์ไฟฟ้ามีกำลังมากเท่าใดก็ยิ่งต้องใช้กำลังในการเร่งความเร็วมากขึ้นเท่านั้น เครือข่ายไฟฟ้าบางเครือข่ายไม่ยอมรับระบอบการปกครองนี้โดยไม่มีผลกระทบ
การบรรทุกเกินพิกัดของสายจ่ายไฟจะทำให้แรงดันไฟฟ้าเครือข่ายลดลงอย่างหลีกเลี่ยงไม่ได้ สิ่งนี้ไม่เพียงทำให้การสตาร์ทมอเตอร์ไฟฟ้ายากขึ้นเท่านั้น แต่ยังส่งผลกระทบต่อผู้บริโภครายอื่นด้วย
และตัวมอเตอร์ไฟฟ้าเองก็เผชิญกับภาระทางกลและทางไฟฟ้าที่เพิ่มขึ้นในระหว่างกระบวนการสตาร์ท กลไกเกี่ยวข้องกับแรงบิดที่เพิ่มขึ้นบนเพลา อุปกรณ์ไฟฟ้าที่เกี่ยวข้องกับการเพิ่มขึ้นของกระแสไฟฟ้าในระยะสั้นส่งผลต่อฉนวนของขดลวดสเตเตอร์และโรเตอร์ การเชื่อมต่อหน้าสัมผัส และอุปกรณ์สตาร์ท
วิธีการลดกระแสไหลเข้า
มอเตอร์ไฟฟ้ากำลังต่ำที่มีบัลลาสต์ราคาไม่แพงสตาร์ทได้ค่อนข้างดีโดยไม่ต้องใช้วิธีใดๆ การลดกระแสเริ่มต้นหรือการเปลี่ยนความเร็วในการหมุนไม่สามารถทำได้ในเชิงเศรษฐกิจ
แต่เมื่ออิทธิพลต่อโหมดการทำงานของเครือข่ายในระหว่างกระบวนการเริ่มต้นมีความสำคัญ กระแสไหลเข้าจะต้องลดลง สามารถทำได้โดย:
- การใช้มอเตอร์ไฟฟ้ากับโรเตอร์แบบพันแผล
- การใช้วงจรเปลี่ยนขดลวดจากสตาร์เป็นเดลต้า
- การใช้ซอฟต์สตาร์ทเตอร์
- การใช้ตัวแปลงความถี่
วิธีการเหล่านี้อย่างน้อยหนึ่งวิธีเหมาะสมกับแต่ละกลไก
มอเตอร์ไฟฟ้าพร้อมโรเตอร์แบบพันแผล
 การใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัสกับโรเตอร์แบบพันแผลในพื้นที่ทำงานที่มีสภาพการทำงานที่ยากลำบากเป็นรูปแบบที่เก่าแก่ที่สุดในการลดกระแสสตาร์ท หากไม่มีสิ่งเหล่านี้ การทำงานของเครนไฟฟ้า รถขุด รวมถึงเครื่องย่อย เครื่องคัดแยก และโรงสี ซึ่งแทบจะไม่ได้เริ่มต้นเมื่อไม่มีผลิตภัณฑ์ในกลไกขับเคลื่อนก็เป็นไปไม่ได้
การใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัสกับโรเตอร์แบบพันแผลในพื้นที่ทำงานที่มีสภาพการทำงานที่ยากลำบากเป็นรูปแบบที่เก่าแก่ที่สุดในการลดกระแสสตาร์ท หากไม่มีสิ่งเหล่านี้ การทำงานของเครนไฟฟ้า รถขุด รวมถึงเครื่องย่อย เครื่องคัดแยก และโรงสี ซึ่งแทบจะไม่ได้เริ่มต้นเมื่อไม่มีผลิตภัณฑ์ในกลไกขับเคลื่อนก็เป็นไปไม่ได้
การลดกระแสเริ่มต้นทำได้โดยการค่อยๆ ถอดตัวต้านทานออกจากวงจรโรเตอร์ ในตอนแรก ในขณะที่ใช้แรงดันไฟฟ้า ความต้านทานสูงสุดที่เป็นไปได้จะเชื่อมต่อกับโรเตอร์ เมื่อรีเลย์เวลาเร่งความเร็ว คอนแทคเตอร์จะเปิดทีละตัวซึ่งจะข้ามส่วนต้านทานแต่ละส่วน เมื่อสิ้นสุดการเร่งความเร็ว ความต้านทานเพิ่มเติมที่เชื่อมต่อกับวงจรโรเตอร์จะเป็นศูนย์
มอเตอร์เครนไม่มีการสลับสเตจอัตโนมัติด้วยตัวต้านทาน สิ่งนี้เกิดขึ้นตามความประสงค์ของผู้ควบคุมเครนในการเคลื่อนย้ายคันโยกควบคุม
การสลับไดอะแกรมการเชื่อมต่อขดลวดสเตเตอร์
 ในเบอร์โน (บล็อกจ่ายสตาร์ทการพันของขดลวด) ของมอเตอร์ไฟฟ้าสามเฟสใดๆ จะมีขั้วต่อ 6 ขั้วจากขดลวดของทุกเฟส ดังนั้นจึงสามารถเชื่อมต่อกันเป็นรูปดาวหรือรูปสามเหลี่ยมได้
ในเบอร์โน (บล็อกจ่ายสตาร์ทการพันของขดลวด) ของมอเตอร์ไฟฟ้าสามเฟสใดๆ จะมีขั้วต่อ 6 ขั้วจากขดลวดของทุกเฟส ดังนั้นจึงสามารถเชื่อมต่อกันเป็นรูปดาวหรือรูปสามเหลี่ยมได้
ด้วยเหตุนี้จึงมีความคล่องตัวในการใช้มอเตอร์ไฟฟ้าแบบอะซิงโครนัส วงจรเชื่อมต่อแบบสตาร์ได้รับการออกแบบสำหรับระดับแรงดันไฟฟ้าที่สูงกว่า (เช่น 660V) และการเชื่อมต่อแบบสามเหลี่ยมสำหรับระดับแรงดันไฟฟ้าที่ต่ำกว่า (ในตัวอย่างนี้คือ 380V)
แต่ที่แรงดันไฟฟ้าที่กำหนดซึ่งสอดคล้องกับวงจรเดลต้า คุณสามารถใช้วงจรสตาร์เพื่อเร่งความเร็วมอเตอร์ไฟฟ้าล่วงหน้าได้ ในกรณีนี้ ขดลวดทำงานที่แรงดันไฟฟ้าที่ลดลง (380V แทนที่จะเป็น 660) และกระแสไฟกระชากจะลดลง
ในการควบคุมกระบวนการสวิตชิ่ง คุณจะต้องใช้สายเคเบิลเพิ่มเติมในมอเตอร์ไฟฟ้า เนื่องจากมีการใช้ขั้วต่อขดลวดทั้ง 6 เส้น มีการติดตั้งสตาร์ทเตอร์และรีเลย์เวลาเพิ่มเติมเพื่อควบคุมการทำงาน
ตัวแปลงความถี่
สองวิธีแรกไม่สามารถใช้ได้ทุกที่ แต่รุ่นต่อมาซึ่งมีวางจำหน่ายค่อนข้างเร็ว ๆ นี้ทำให้สามารถสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสได้อย่างราบรื่น
ตัวแปลงความถี่เป็นอุปกรณ์เซมิคอนดักเตอร์ที่ซับซ้อนซึ่งรวมเอาระบบอิเล็กทรอนิกส์กำลังและองค์ประกอบของเทคโนโลยีไมโครโปรเซสเซอร์เข้าด้วยกัน ส่วนกำลังจะแก้ไขและทำให้แรงดันไฟฟ้าหลักเรียบขึ้น โดยเปลี่ยนเป็นแรงดันไฟฟ้าคงที่ ส่วนเอาต์พุตของแรงดันไฟฟ้านี้ก่อตัวเป็นไซน์ซอยด์ที่มีความถี่แปรผันจากศูนย์ถึงค่าระบุ - 50 Hz
ด้วยเหตุนี้ จึงประหยัดพลังงานได้: หน่วยที่ขับเคลื่อนด้วยการหมุนจะไม่ทำงานด้วยประสิทธิภาพการผลิตที่มากเกินไป โดยอยู่ในโหมดที่กำหนดอย่างเคร่งครัด นอกจากนี้กระบวนการทางเทคโนโลยียังมีโอกาสที่จะได้รับการปรับแต่งอย่างละเอียดอีกด้วย

แต่สิ่งสำคัญในขอบเขตของปัญหาที่กำลังพิจารณา: ตัวแปลงความถี่ช่วยให้สตาร์ทมอเตอร์ไฟฟ้าได้อย่างราบรื่น โดยไม่มีแรงกระแทกและการกระตุก ไม่มีกระแสเริ่มต้นเลย
ซอฟต์สตาร์ทเตอร์
ชุดซอฟต์สตาร์ทสำหรับมอเตอร์ไฟฟ้าเป็นตัวแปลงความถี่เดียวกัน แต่มีฟังก์ชันการทำงานที่จำกัด ใช้งานได้เฉพาะเมื่อมอเตอร์ไฟฟ้าเร่งความเร็วและเปลี่ยนความเร็วในการหมุนอย่างราบรื่นจากค่าต่ำสุดที่ระบุไปเป็นค่าที่ระบุ
เพื่อป้องกันการทำงานของอุปกรณ์อย่างไร้ประโยชน์หลังจากการเร่งความเร็วของมอเตอร์ไฟฟ้าเสร็จสิ้น จึงมีการติดตั้งคอนแทคเตอร์บายพาสไว้ใกล้เคียง จะเชื่อมต่อมอเตอร์ไฟฟ้าเข้ากับเครือข่ายโดยตรงหลังจากการสตาร์ทเสร็จสิ้น
เมื่อทำการอัพเกรดอุปกรณ์ นี่เป็นวิธีที่ง่ายที่สุด มักจะสามารถทำได้ด้วยมือของคุณเองโดยไม่ต้องมีผู้เชี่ยวชาญเฉพาะทางสูงเข้ามาเกี่ยวข้อง อุปกรณ์ได้รับการติดตั้งแทนสตาร์ทเตอร์แม่เหล็กที่ควบคุมการสตาร์ทมอเตอร์ไฟฟ้า อาจจำเป็นต้องเปลี่ยนสายเคเบิลเป็นแบบมีชีลด์ จากนั้นพารามิเตอร์ของมอเตอร์ไฟฟ้าจะถูกป้อนลงในหน่วยความจำของอุปกรณ์และพร้อมสำหรับการดำเนินการ
แต่ไม่ใช่ทุกคนที่สามารถจัดการตัวแปลงความถี่เต็มรูปแบบได้ด้วยตัวเอง ดังนั้นการใช้สำเนาเดี่ยวจึงไม่มีความหมาย การติดตั้งตัวแปลงความถี่มีความสมเหตุสมผลเฉพาะเมื่อดำเนินการปรับปรุงอุปกรณ์ไฟฟ้าทั่วไปขององค์กรให้ทันสมัยเท่านั้น
การสตาร์ทมอเตอร์เหนี่ยวนำอย่างราบรื่นนั้นเป็นงานที่ยากเสมอ เนื่องจากการสตาร์ทมอเตอร์เหนี่ยวนำต้องใช้กระแสและแรงบิดจำนวนมาก ซึ่งทำให้ขดลวดมอเตอร์ไหม้ได้ วิศวกรเสนอและใช้วิธีแก้ปัญหาทางเทคนิคที่น่าสนใจอย่างต่อเนื่องเพื่อแก้ไขปัญหานี้ เช่น การใช้วงจรสวิตชิ่ง เครื่องเปลี่ยนรูปแบบอัตโนมัติ เป็นต้น
ปัจจุบันมีการใช้วิธีการที่คล้ายกันในการติดตั้งทางอุตสาหกรรมต่างๆ เพื่อให้มอเตอร์ไฟฟ้าทำงานอย่างต่อเนื่อง
หลักการทำงานของมอเตอร์ไฟฟ้าเหนี่ยวนำเป็นที่รู้จักจากฟิสิกส์สาระสำคัญทั้งหมดคือการใช้ความแตกต่างระหว่างความถี่การหมุนของสนามแม่เหล็กของสเตเตอร์และโรเตอร์ สนามแม่เหล็กของโรเตอร์ซึ่งพยายามไล่ตามสนามแม่เหล็กของสเตเตอร์นั้นมีส่วนช่วยในการกระตุ้นกระแสสตาร์ทขนาดใหญ่ มอเตอร์ทำงานด้วยความเร็วสูงสุด และค่าแรงบิดก็เพิ่มขึ้นตามกระแสด้วย ส่งผลให้ขดลวดของเครื่องอาจเสียหายเนื่องจากความร้อนสูงเกินไป
ดังนั้นจึงจำเป็นต้องติดตั้งซอฟต์สตาร์ทเตอร์ ซอฟต์สตาร์ทเตอร์สำหรับมอเตอร์อะซิงโครนัสสามเฟสช่วยให้คุณสามารถปกป้องยูนิตจากกระแสสูงเริ่มต้นและแรงบิดที่เกิดขึ้นเนื่องจากการเลื่อนเมื่อใช้งานมอเตอร์เหนี่ยวนำ
ข้อดีของการใช้วงจรที่มีชุดซอฟต์สตาร์ท (SPD):
- การลดกระแสเริ่มต้น
- การลดต้นทุนด้านพลังงาน
- เพิ่มประสิทธิภาพ
- ต้นทุนค่อนข้างต่ำ
- บรรลุความเร็วสูงสุดโดยไม่ทำให้ตัวเครื่องเสียหาย
สตาร์ทเครื่องยนต์อย่างไรให้ราบรื่น?
มีวิธีสตาร์ทแบบนุ่มนวลหลักๆ ห้าวิธี
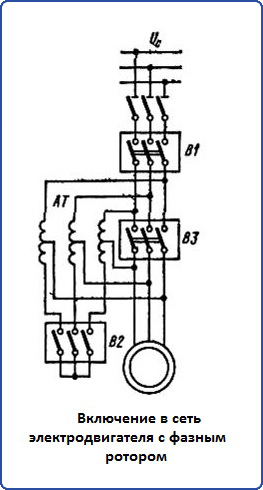
- สามารถสร้างแรงบิดสูงได้โดยการเพิ่มความต้านทานภายนอกให้กับวงจรโรเตอร์ดังแสดงในรูป

- ด้วยการรวมหม้อแปลงอัตโนมัติไว้ในวงจร ทำให้สามารถรักษากระแสสตาร์ทและแรงบิดได้โดยการลดแรงดันไฟฟ้าเริ่มต้น ดูภาพด้านล่าง

- การสตาร์ทโดยตรงเป็นวิธีการที่ง่ายและถูกที่สุด เนื่องจากมอเตอร์เหนี่ยวนำเชื่อมต่อโดยตรงกับแหล่งพลังงาน
- การต่อโดยใช้รูปแบบการม้วนแบบพิเศษ - วิธีนี้ใช้ได้กับมอเตอร์ที่มุ่งหมายให้ทำงานภายใต้สภาวะปกติ

- การใช้ SCP เป็นวิธีการที่ทันสมัยที่สุดในบรรดาวิธีการทั้งหมดที่ระบุไว้ ในที่นี้ อุปกรณ์เซมิคอนดักเตอร์ เช่น ไทริสเตอร์หรือ SCR ซึ่งควบคุมความเร็วของมอเตอร์เหนี่ยวนำ สามารถแทนที่ส่วนประกอบทางกลได้สำเร็จ

ตัวควบคุมความเร็วมอเตอร์สับเปลี่ยน
วงจรส่วนใหญ่สำหรับเครื่องใช้ในครัวเรือนและเครื่องมือไฟฟ้าใช้มอเตอร์สับเปลี่ยนขนาด 220 V ความต้องการนี้อธิบายได้จากความสามารถรอบด้าน หน่วยสามารถขับเคลื่อนจากแรงดันไฟฟ้าตรงหรือไฟฟ้ากระแสสลับ ข้อดีของวงจรเกิดจากการให้แรงบิดสตาร์ทที่มีประสิทธิภาพ
เพื่อให้การเริ่มต้นราบรื่นขึ้นและมีความสามารถในการปรับความเร็วในการหมุนได้จึงใช้ตัวควบคุมความเร็ว
คุณสามารถสตาร์ทมอเตอร์ไฟฟ้าด้วยมือของคุณเองได้ด้วยวิธีนี้
การสตาร์ทแบบนุ่มนวลถูกนำมาใช้กันอย่างแพร่หลายในการสตาร์ทมอเตอร์ไฟฟ้าอย่างปลอดภัย เมื่อสตาร์ทเครื่องยนต์ กระแสไฟที่กำหนด (ใน) จะเกิน 7 เท่า จากกระบวนการนี้ ระยะเวลาการทำงานของมอเตอร์ลดลง กล่าวคือ ขดลวดสเตเตอร์และภาระที่สำคัญบนแบริ่ง ด้วยเหตุนี้จึงแนะนำให้สตาร์ทเครื่องมือไฟฟ้าแบบนุ่มนวลด้วยมือของคุณเองโดยที่ไม่ได้จัดเตรียมไว้ให้
ข้อมูลทั่วไป
สเตเตอร์ของมอเตอร์ไฟฟ้าเป็นขดลวดเหนี่ยวนำดังนั้นจึงมีความต้านทานกับส่วนประกอบที่ทำงานและปฏิกิริยา

เมื่อกระแสไฟฟ้าไหลผ่านองค์ประกอบรังสีมีความต้านทานกับส่วนประกอบที่ใช้งานอยู่ การสูญเสียเกิดขึ้นเนื่องจากการแปลงพลังงานส่วนหนึ่งเป็นพลังงานความร้อน ตัวอย่างเช่น ตัวต้านทานและขดลวดสเตเตอร์ของมอเตอร์ไฟฟ้ามีความต้านทานกับส่วนประกอบที่ทำงานอยู่ การคำนวณความต้านทานแบบแอคทีฟนั้นไม่ใช่เรื่องยากเนื่องจากเฟสของกระแส (I) และแรงดันไฟฟ้า (U) ตรงกัน การใช้กฎของโอห์มสำหรับส่วนของวงจร คุณสามารถคำนวณความต้านทานเชิงแอ็กทีฟได้: R = U/I ขึ้นอยู่กับวัสดุ พื้นที่หน้าตัด ความยาว และอุณหภูมิ
หากกระแสไฟฟ้าผ่านองค์ประกอบประเภทปฏิกิริยา (ที่มีลักษณะ capacitive และอุปนัย) ในกรณีนี้ R ปฏิกิริยาจะปรากฏขึ้น ตัวเหนี่ยวนำที่ไม่มีความต้านทานแบบแอคทีฟจริง ๆ (การคำนวณไม่ได้คำนึงถึง R ของขดลวดของมัน ). R ประเภทนี้ถูกสร้างขึ้นเนื่องจากแรงเคลื่อนไฟฟ้า (EMF) ของการเหนี่ยวนำตัวเอง ซึ่งเป็นสัดส่วนโดยตรงกับความเหนี่ยวนำและความถี่ที่ฉันผ่านรอบของมัน: Xl = wL โดยที่ w คือความถี่เชิงมุมของกระแสสลับ (w = 2*Pi*f และ f - ความถี่ปัจจุบันของเครือข่าย) และ L - ตัวเหนี่ยวนำ (L = n * n / Rm, n - จำนวนรอบและ Rm - ความต้านทานแม่เหล็ก)
เมื่อเปิดมอเตอร์ไฟฟ้า กระแสเริ่มต้นจะมากกว่ากระแสที่กำหนด 7 เท่า (กระแสที่ใช้ระหว่างการทำงานของเครื่องมือ) และขดลวดสเตเตอร์จะร้อนขึ้น หากขดลวดสเตเตอร์เก่าอาจเกิดการลัดวงจรระหว่างกันซึ่งจะทำให้เครื่องมือไฟฟ้าทำงานล้มเหลว ในการดำเนินการนี้ คุณจะต้องใช้ซอฟต์สตาร์ทเตอร์สำหรับเครื่องมือไฟฟ้า
วิธีหนึ่งในการลดกระแสกระชาก (Ip) คือการสลับขดลวด เพื่อนำไปใช้งาน จำเป็นต้องมีรีเลย์ 2 ประเภท (เวลาและโหลด) และมีคอนแทคเตอร์สามตัว
 การสตาร์ทมอเตอร์ไฟฟ้าโดยเชื่อมต่อขดลวดแบบดาวสามารถทำได้เฉพาะกับคอนแทคเตอร์ 2 ตัวที่ไม่ปิดพร้อมกัน หลังจากช่วงเวลาหนึ่งซึ่งกำหนดโดยรีเลย์เวลา คอนแทคเตอร์ตัวใดตัวหนึ่งจะถูกปิด และอีกตัวหนึ่งซึ่งไม่เคยใช้ก่อนหน้านี้จะถูกเปิดใช้งาน ด้วยการสลับสวิตช์ขดลวดนี้ กระแสไหลเข้าจึงลดลง วิธีนี้มีข้อเสียเปรียบที่สำคัญ เนื่องจากเมื่อคอนแทคเตอร์สองตัวปิดพร้อมกันจะเกิดกระแสไฟฟ้าลัดวงจร อย่างไรก็ตามเมื่อใช้วิธีนี้ ขดลวดจะยังคงร้อนขึ้นต่อไป
การสตาร์ทมอเตอร์ไฟฟ้าโดยเชื่อมต่อขดลวดแบบดาวสามารถทำได้เฉพาะกับคอนแทคเตอร์ 2 ตัวที่ไม่ปิดพร้อมกัน หลังจากช่วงเวลาหนึ่งซึ่งกำหนดโดยรีเลย์เวลา คอนแทคเตอร์ตัวใดตัวหนึ่งจะถูกปิด และอีกตัวหนึ่งซึ่งไม่เคยใช้ก่อนหน้านี้จะถูกเปิดใช้งาน ด้วยการสลับสวิตช์ขดลวดนี้ กระแสไหลเข้าจึงลดลง วิธีนี้มีข้อเสียเปรียบที่สำคัญ เนื่องจากเมื่อคอนแทคเตอร์สองตัวปิดพร้อมกันจะเกิดกระแสไฟฟ้าลัดวงจร อย่างไรก็ตามเมื่อใช้วิธีนี้ ขดลวดจะยังคงร้อนขึ้นต่อไป
อีกวิธีหนึ่งในการลดกระแสสตาร์ทคือการควบคุมความถี่ในการสตาร์ทมอเตอร์ไฟฟ้า หลักการของแนวทางนี้คือการเปลี่ยนแปลงความถี่ของการจ่าย U องค์ประกอบหลักของซอฟต์สตาร์ทประเภทนี้คือตัวแปลงความถี่ ประกอบด้วยองค์ประกอบดังต่อไปนี้:
- วงจรเรียงกระแส
- โซ่กลาง.
- อินเวอร์เตอร์
- วงจรควบคุมอิเล็กทรอนิกส์
วงจรเรียงกระแสทำจากไดโอดทรงพลังหรือไทริสเตอร์ทำหน้าที่เป็นตัวแปลง U ของแหล่งจ่ายไฟเครือข่ายเป็นกระแสเร้าใจโดยตรง วงจรระดับกลางจะปรับกระแสตรงแบบเร้าใจที่เอาต์พุตของวงจรเรียงกระแสให้เรียบซึ่งรวบรวมไว้ในตัวเก็บประจุขนาดใหญ่ อินเวอร์เตอร์จำเป็นต้องแปลงสัญญาณที่เอาต์พุตของวงจรกลางโดยตรงเป็นสัญญาณของแอมพลิจูดและความถี่ของส่วนประกอบตัวแปร จำเป็นต้องมีวงจรควบคุมอิเล็กทรอนิกส์เพื่อสร้างสัญญาณที่จำเป็นในการควบคุมวงจรเรียงกระแสหรืออินเวอร์เตอร์
หลักการทำงาน
ในระหว่างการสตาร์ทมอเตอร์ไฟฟ้าแบบสับเปลี่ยนกระแสไฟฟ้า จะเกิดการสิ้นเปลืองกระแสไฟเพิ่มขึ้นอย่างมากในระยะสั้น ซึ่งทำให้เครื่องมือไฟฟ้าขัดข้องก่อนเวลาอันควรและจำเป็นต้องได้รับการซ่อมแซม ชิ้นส่วนไฟฟ้าสึกหรอ (กระแสไฟฟ้าเกิน 7 เท่า) และชิ้นส่วนกลไก (สตาร์ทคมชัด) ในการจัดระเบียบการสตาร์ทแบบ "ซอฟต์สตาร์ท" ควรใช้อุปกรณ์สตาร์ทแบบนุ่มนวล (ต่อไปนี้จะเรียกว่าซอฟต์สตาร์ทเตอร์) อุปกรณ์เหล่านี้ต้องเป็นไปตามข้อกำหนดพื้นฐาน:

ที่ใช้กันอย่างแพร่หลายที่สุดคือ triac soft Starters หลักการทำงานคือการควบคุม U อย่างราบรื่นโดยการปรับมุมเปิดของทางแยก triac ไทรแอกจะต้องเชื่อมต่อโดยตรงกับขดลวดมอเตอร์และช่วยให้คุณสามารถลดกระแสสตาร์ทจาก 2 ถึง 5 เท่า (ขึ้นอยู่กับไทรแอคและวงจรควบคุม) ข้อเสียเปรียบหลักของ Triac Soft Starter มีดังต่อไปนี้:
- แผนการที่ซับซ้อน
- ขดลวดร้อนเกินไปในระหว่างการสตาร์ทเป็นเวลานาน
- ปัญหาในการสตาร์ทเครื่องยนต์ (ทำให้ขดลวดสเตเตอร์ร้อนอย่างมีนัยสำคัญ)
วงจรจะซับซ้อนมากขึ้นเมื่อใช้เครื่องยนต์ที่ทรงพลัง อย่างไรก็ตาม ด้วยโหลดที่เบาและความเร็วรอบเดินเบา จึงสามารถใช้วงจรง่ายๆ ได้
 ซอฟต์สตาร์ทเตอร์ที่มีตัวควบคุมโดยไม่มีการป้อนกลับ (1 หรือ 3 เฟส) แพร่หลายมากขึ้น ในรุ่นประเภทนี้ สามารถตั้งเวลาสตาร์ทและค่า U ล่วงหน้าก่อนสตาร์ทเครื่องยนต์ได้ อย่างไรก็ตาม ในกรณีนี้ ไม่สามารถควบคุมปริมาณแรงบิดภายใต้ภาระได้ ในรุ่นนี้ จะใช้อุปกรณ์พิเศษเพื่อลดกระแสสตาร์ท ป้องกันการสูญเสียเฟสและความไม่สมดุล รวมถึงการโอเวอร์โหลด รุ่นโรงงานมีฟังก์ชั่นตรวจสอบสภาพของมอเตอร์ไฟฟ้า
ซอฟต์สตาร์ทเตอร์ที่มีตัวควบคุมโดยไม่มีการป้อนกลับ (1 หรือ 3 เฟส) แพร่หลายมากขึ้น ในรุ่นประเภทนี้ สามารถตั้งเวลาสตาร์ทและค่า U ล่วงหน้าก่อนสตาร์ทเครื่องยนต์ได้ อย่างไรก็ตาม ในกรณีนี้ ไม่สามารถควบคุมปริมาณแรงบิดภายใต้ภาระได้ ในรุ่นนี้ จะใช้อุปกรณ์พิเศษเพื่อลดกระแสสตาร์ท ป้องกันการสูญเสียเฟสและความไม่สมดุล รวมถึงการโอเวอร์โหลด รุ่นโรงงานมีฟังก์ชั่นตรวจสอบสภาพของมอเตอร์ไฟฟ้า
วงจรควบคุมเฟสเดียวที่ง่ายที่สุดนั้นดำเนินการบนไทรแอคเดี่ยวและใช้สำหรับเครื่องมือที่มีกำลังสูงถึง 12 กิโลวัตต์ มีวงจรที่ซับซ้อนมากขึ้นที่ให้คุณปรับพารามิเตอร์กำลังของเครื่องยนต์ที่มีกำลังสูงสุด 260 กิโลวัตต์ เมื่อเลือกซอฟต์สตาร์ทเตอร์ที่ผลิตจากโรงงานจำเป็นต้องคำนึงถึงพารามิเตอร์ต่อไปนี้: กำลัง, โหมดการทำงานที่เป็นไปได้, ความเท่าเทียมกันของกระแสที่อนุญาต และจำนวนสตาร์ทในช่วงเวลาหนึ่ง
การประยุกต์ใช้ในเครื่องบดมุม
 เมื่อสตาร์ทเครื่องเจียรมุม (เครื่องบดมุม) โหลดไดนามิกสูงจะปรากฏบนชิ้นส่วนเครื่องมือ
เมื่อสตาร์ทเครื่องเจียรมุม (เครื่องบดมุม) โหลดไดนามิกสูงจะปรากฏบนชิ้นส่วนเครื่องมือ
รุ่นราคาแพงมีการติดตั้งซอฟต์สตาร์ทเตอร์ แต่ไม่ใช่รุ่นธรรมดาเช่นเครื่องบดมุมจาก บริษัท Interskol การกระตุกแบบเฉื่อยสามารถฉีกเครื่องบดมุมออกจากมือของคุณได้ และนี่เป็นภัยคุกคามต่อชีวิตและสุขภาพ นอกจากนี้เมื่อสตาร์ทมอเตอร์ไฟฟ้าของเครื่องมือจะเกิดกระแสเกินและส่งผลให้แปรงสึกหรอและความร้อนที่สำคัญของขดลวดสเตเตอร์ทำให้กระปุกเกียร์สึกหรอและจานตัดอาจถูกทำลายซึ่งอาจแตกได้ ได้ตลอดเวลาและก่อให้เกิดอันตรายต่อสุขภาพและแม้กระทั่งชีวิตด้วย เครื่องมือจะต้องมีการรักษาความปลอดภัยและด้วยเหตุนี้คุณควรเริ่มต้นอย่างราบรื่นด้วยมือของคุณเอง
ตัวเลือกแบบโฮมเมด
 มีหลายรูปแบบในการปรับปรุงเครื่องมือไฟฟ้าให้ทันสมัยโดยใช้ซอฟต์สตาร์ทเตอร์ ในบรรดาอุปกรณ์ทุกประเภทนั้นมีการใช้อุปกรณ์ที่ใช้ triacs กันอย่างแพร่หลาย ไตรแอคเป็นองค์ประกอบเซมิคอนดักเตอร์ที่ช่วยให้คุณควบคุมพารามิเตอร์พลังงานได้อย่างราบรื่น มีวงจรที่เรียบง่ายและซับซ้อนซึ่งแตกต่างกันในตัวเลือกการออกแบบ รวมถึงกำลังที่รองรับของเครื่องมือไฟฟ้าที่เชื่อมต่ออยู่ การออกแบบประกอบด้วยภายในซึ่งช่วยให้สามารถสร้างภายในเคสและภายนอกซึ่งผลิตในรูปแบบของโมดูลแยกต่างหากซึ่งทำหน้าที่เป็นตัว จำกัด ความเร็วและกระแสเริ่มต้นเมื่อสตาร์ทเครื่องบดมุมโดยตรง
มีหลายรูปแบบในการปรับปรุงเครื่องมือไฟฟ้าให้ทันสมัยโดยใช้ซอฟต์สตาร์ทเตอร์ ในบรรดาอุปกรณ์ทุกประเภทนั้นมีการใช้อุปกรณ์ที่ใช้ triacs กันอย่างแพร่หลาย ไตรแอคเป็นองค์ประกอบเซมิคอนดักเตอร์ที่ช่วยให้คุณควบคุมพารามิเตอร์พลังงานได้อย่างราบรื่น มีวงจรที่เรียบง่ายและซับซ้อนซึ่งแตกต่างกันในตัวเลือกการออกแบบ รวมถึงกำลังที่รองรับของเครื่องมือไฟฟ้าที่เชื่อมต่ออยู่ การออกแบบประกอบด้วยภายในซึ่งช่วยให้สามารถสร้างภายในเคสและภายนอกซึ่งผลิตในรูปแบบของโมดูลแยกต่างหากซึ่งทำหน้าที่เป็นตัว จำกัด ความเร็วและกระแสเริ่มต้นเมื่อสตาร์ทเครื่องบดมุมโดยตรง
โครงการที่ง่ายที่สุด
ชุดซอฟต์สตาร์ทที่มีการควบคุมความเร็วบนไทริสเตอร์ KU 202 มีการใช้กันอย่างแพร่หลายเนื่องจากมีการออกแบบที่เรียบง่ายมาก (แผนภาพที่ 1) การเชื่อมต่อไม่จำเป็นต้องมีทักษะพิเศษใดๆ องค์ประกอบวิทยุนั้นหาได้ง่ายมาก รุ่นควบคุมนี้ประกอบด้วยไดโอดบริดจ์ ตัวต้านทานผันแปร (ทำหน้าที่เป็นตัวควบคุม U) และวงจรปรับไทริสเตอร์ (จ่าย U ไปยังเอาต์พุตควบคุมด้วยค่าระบุ 6.3 โวลต์) จากผู้ผลิตในประเทศ

จำนวนโครงการที่ 1 แผนภาพไฟฟ้าของคอยล์เย็นพร้อมระบบควบคุมความเร็วและการสตาร์ทแบบนุ่มนวล (แผนภาพวงจรไฟฟ้า)
 เนื่องจากขนาดและจำนวนชิ้นส่วน ตัวควบคุมชนิดนี้จึงสามารถติดตั้งไว้ในตัวเครื่องมือไฟฟ้าได้ นอกจากนี้ ควรถอดลูกบิดตัวต้านทานแบบแปรผันออก และตัวควบคุมความเร็วสามารถแก้ไขได้โดยการรวมปุ่มไว้ด้านหน้าไดโอดบริดจ์
เนื่องจากขนาดและจำนวนชิ้นส่วน ตัวควบคุมชนิดนี้จึงสามารถติดตั้งไว้ในตัวเครื่องมือไฟฟ้าได้ นอกจากนี้ ควรถอดลูกบิดตัวต้านทานแบบแปรผันออก และตัวควบคุมความเร็วสามารถแก้ไขได้โดยการรวมปุ่มไว้ด้านหน้าไดโอดบริดจ์
หลักการพื้นฐานของการทำงานคือการควบคุมความเร็วของมอเตอร์ไฟฟ้าของเครื่องมือโดยการจำกัดกำลังในโหมดแมนนวล วงจรนี้ให้คุณใช้เครื่องมือไฟฟ้าที่มีกำลังสูงถึง 1.5 kW ในการเพิ่มตัวบ่งชี้นี้จำเป็นต้องเปลี่ยนไทริสเตอร์ด้วยไทริสเตอร์ที่ทรงพลังกว่า (ข้อมูลเกี่ยวกับสิ่งนี้สามารถพบได้บนอินเทอร์เน็ตหรือในหนังสืออ้างอิง) นอกจากนี้คุณต้องคำนึงถึงความจริงที่ว่าวงจรควบคุมไทริสเตอร์จะแตกต่างจากวงจรเดิม KU 202 เป็นไทริสเตอร์ที่ยอดเยี่ยม แต่ข้อเสียเปรียบที่สำคัญคือการกำหนดค่า (การเลือกชิ้นส่วนสำหรับวงจรควบคุม) หากต้องการใช้ซอฟต์สตาร์ทในโหมดอัตโนมัติ จะใช้โครงร่าง 2 (ซอฟต์สตาร์ทบนไมโครวงจร)
สตาร์ทแบบนุ่มนวลบนชิป
ตัวเลือกที่ดีที่สุดสำหรับการผลิตซอฟต์สตาร์ทคือวงจรซอฟต์สตาร์ทที่มีหนึ่งไตรแอคและไมโครวงจรที่ควบคุมการเปิดทางแยกประเภท p-n อย่างราบรื่น อุปกรณ์นี้ใช้พลังงานจากเครือข่าย 220 V และประกอบเองได้ง่าย วงจรซอฟต์สตาร์ทที่เรียบง่ายและเป็นสากลสำหรับมอเตอร์ไฟฟ้ายังช่วยให้คุณควบคุมความเร็วได้ (แผนภาพ 2) ไทรแอกสามารถถูกแทนที่ด้วยอันเดียวกันหรือมีลักษณะพิเศษเกินกว่าของดั้งเดิมตามหนังสืออ้างอิงขององค์ประกอบรังสีชนิดเซมิคอนดักเตอร์

โครงการที่ 2 โครงการสำหรับการสตาร์ทเครื่องมือไฟฟ้าอย่างนุ่มนวล
 อุปกรณ์ดังกล่าวได้รับการติดตั้งบนพื้นฐานของไมโครวงจร KR118PM1 และไตรแอค เนื่องจากความอเนกประสงค์ของอุปกรณ์จึงสามารถใช้กับเครื่องมือใดก็ได้ ไม่ต้องกำหนดค่าและติดตั้งเข้ากับสายไฟ
อุปกรณ์ดังกล่าวได้รับการติดตั้งบนพื้นฐานของไมโครวงจร KR118PM1 และไตรแอค เนื่องจากความอเนกประสงค์ของอุปกรณ์จึงสามารถใช้กับเครื่องมือใดก็ได้ ไม่ต้องกำหนดค่าและติดตั้งเข้ากับสายไฟ
เมื่อมอเตอร์ไฟฟ้าสตาร์ท U จะจ่ายให้กับ KR118PM1 และประจุของตัวเก็บประจุ C2 จะค่อยๆ เพิ่มขึ้น ไทริสเตอร์จะเปิดขึ้นทีละน้อยโดยมีความล่าช้าขึ้นอยู่กับความจุของตัวเก็บประจุควบคุม C2 ด้วยความจุ C2 = 47 μF จึงมีความล่าช้าในการสตาร์ทประมาณ 2 วินาที ขึ้นอยู่กับสัดส่วนโดยตรงกับความจุของตัวเก็บประจุ (ด้วยความจุที่มากขึ้น เวลาเริ่มต้นจะเพิ่มขึ้น) เมื่อปิดเครื่องบดมุม ตัวเก็บประจุ C2 จะถูกคายประจุโดยใช้ตัวต้านทาน R2 ซึ่งมีความต้านทาน 68 k และเวลาในการคายประจุคือประมาณ 4 วินาที

ในการควบคุมความเร็ว คุณต้องเปลี่ยน R1 ด้วยตัวต้านทานแบบปรับค่าได้ เมื่อเปลี่ยนพารามิเตอร์ของตัวต้านทานผันแปร กำลังของมอเตอร์ไฟฟ้าจะเปลี่ยนไป R2 เปลี่ยนปริมาณกระแสที่ไหลผ่านอินพุตไตรแอค ไทรแอกต้องการการระบายความร้อน ดังนั้นจึงสามารถติดตั้งพัดลมไว้ในตัวเรือนโมดูลได้
หน้าที่หลักของตัวเก็บประจุ C1 และ C3 คือการปกป้องและควบคุมชิป ควรเลือก triac ตามคุณสมบัติดังต่อไปนี้: direct U ควรเป็น 400..500 V และกระแสตรงควรมีอย่างน้อย 25 A ด้วยการจัดอันดับองค์ประกอบวิทยุดังกล่าวคุณสามารถเชื่อมต่อเครื่องมือที่มีกำลังตั้งแต่ 2 kW ถึง 5 kW ไปยังซอฟต์สตาร์ทเตอร์

ดังนั้นในการสตาร์ทมอเตอร์ไฟฟ้าของเครื่องมือต่าง ๆ จึงจำเป็นต้องใช้ซอฟต์สตาร์ทเตอร์ที่ผลิตจากโรงงานหรือทำเองที่บ้าน ซอฟต์สตาร์ทเตอร์ใช้เพื่อเพิ่มอายุการใช้งานของเครื่องมือ เมื่อสตาร์ทเครื่องยนต์จะมีการสิ้นเปลืองกระแสไฟเพิ่มขึ้นอย่างมาก 7 เท่า ด้วยเหตุนี้ขดลวดสเตเตอร์จึงอาจไหม้และชิ้นส่วนทางกลอาจเสื่อมสภาพ ซอฟต์สตาร์ทเตอร์สามารถลดกระแสสตาร์ทได้อย่างมาก เมื่อสร้างซอฟต์สตาร์ทด้วยตัวเอง คุณต้องปฏิบัติตามกฎความปลอดภัยเมื่อทำงานกับไฟฟ้า
ความล้มเหลวของเครื่องมือไฟฟ้าแบบมือถือที่บางครั้งเกิดขึ้น เช่น เครื่องเจียร สว่านไฟฟ้า และเลื่อยจิ๊กซอว์ มักเกี่ยวข้องกับกระแสสตาร์ทที่สูงและโหลดไดนามิกที่สำคัญบนชิ้นส่วนกระปุกเกียร์ที่เกิดขึ้นเมื่อเครื่องยนต์สตาร์ทกะทันหัน
อุปกรณ์สตาร์ทแบบนุ่มนวลสำหรับมอเตอร์ไฟฟ้าแบบสับเปลี่ยนตามที่อธิบายไว้ในนั้น มีความซับซ้อนในการออกแบบ ประกอบด้วยตัวต้านทานที่มีความแม่นยำหลายตัว และต้องใช้ความอุตสาหะในการตั้งค่า การใช้ไมโครวงจรควบคุมเฟส KR1182PM1 ช่วยให้สามารถผลิตอุปกรณ์ที่ง่ายกว่ามากเพื่อจุดประสงค์เดียวกันโดยไม่จำเป็นต้องตั้งค่า คุณสามารถเชื่อมต่อได้โดยไม่ต้องดัดแปลงเครื่องมือไฟฟ้ามือถือใด ๆ ที่ขับเคลื่อนโดยเครือข่ายเฟสเดียว 220 V, 50 Hz เครื่องยนต์สตาร์ทและดับด้วยสวิตช์เครื่องมือไฟฟ้า และเมื่อดับ อุปกรณ์จะไม่กินกระแสไฟและสามารถเชื่อมต่อกับเครือข่ายได้อย่างไม่มีกำหนด
แผนภาพของอุปกรณ์ที่นำเสนอจะแสดงในรูป เสียบปลั๊ก XP1 เข้ากับเต้ารับไฟฟ้า และเสียบปลั๊กไฟของเครื่องมือไฟฟ้าเข้ากับเต้ารับ XS1 คุณสามารถติดตั้งและเชื่อมต่อซ็อกเก็ตหลายตัวแบบขนานสำหรับเครื่องมือที่ทำงานสลับกันได้
เมื่อวงจรมอเตอร์ของเครื่องมือไฟฟ้าปิดด้วยสวิตช์ของตัวเอง แรงดันไฟฟ้าจะถูกส่งไปยังตัวควบคุมเฟส DA1 ตัวเก็บประจุ C2 เริ่มชาร์จและแรงดันไฟฟ้าที่ตกคร่อมจะค่อยๆเพิ่มขึ้น เป็นผลให้ความล่าช้าในการเปิดไทริสเตอร์ภายในของตัวควบคุมและ VSI triac ในแต่ละครึ่งรอบที่ตามมาของแรงดันไฟหลักจะลดลงซึ่งนำไปสู่การเพิ่มขึ้นอย่างราบรื่นของกระแสที่ไหลผ่านมอเตอร์และ ส่งผลให้ความเร็วของมันเพิ่มขึ้น ด้วยความจุของตัวเก็บประจุ C2 ที่ระบุในแผนภาพ การเร่งความเร็วของมอเตอร์ไฟฟ้าจนถึงความเร็วสูงสุดจะใช้เวลา 2...2.5 วินาที ซึ่งในทางปฏิบัติไม่สร้างความล่าช้าในการทำงาน แต่กำจัดแรงกระแทกจากความร้อนและไดนามิกในกลไกของเครื่องมือโดยสิ้นเชิง
หลังจากดับเครื่องยนต์แล้ว ตัวเก็บประจุ C2 จะถูกคายประจุผ่านตัวต้านทาน R1 และหลังจากนั้น 2...3 วินาที ทุกอย่างพร้อมที่จะเริ่มต้นใหม่อีกครั้ง ด้วยการแทนที่ตัวต้านทานคงที่ R1 ด้วยตัวแปรคุณสามารถควบคุมพลังงานที่จ่ายให้กับโหลดได้อย่างราบรื่น มันลดลงตามความต้านทานที่ลดลง
ตัวต้านทาน R2 จำกัดกระแสของอิเล็กโทรดควบคุมของ triac และตัวเก็บประจุ C1 และ SZ เป็นองค์ประกอบของวงจรทั่วไปสำหรับการเปิดตัวควบคุมเฟส DA1
ตัวต้านทานและตัวเก็บประจุทั้งหมดถูกบัดกรีเข้ากับขั้วของชิป DA1 โดยตรง เมื่อใช้ร่วมกับพวกมันจะถูกวางไว้ในกล่องอะลูมิเนียมจากสตาร์ทเตอร์หลอดฟลูออเรสเซนต์และเติมด้วยสารประกอบอีพอกซี นำสายไฟออกมาเพียงสองเส้นเท่านั้นซึ่งเชื่อมต่อกับขั้วไตรแอค ก่อนที่จะเทจะมีการเจาะรูที่ส่วนล่างของตัวเครื่องโดยสอดสกรู M3 ด้วยเกลียวด้านนอก สกรูนี้ยึดตัวเครื่องกับแผงระบายความร้อนของ VS1 triac ที่ระยะ 100 ซม." การออกแบบนี้ได้รับการพิสูจน์แล้วว่าค่อนข้างเชื่อถือได้เมื่อใช้ในสภาวะที่มีความชื้นและฝุ่นสูง
อุปกรณ์ไม่ต้องการการตั้งค่าใดๆ สามารถใช้ triac ใด ๆ ระดับแรงดันไฟฟ้าอย่างน้อย 4 (นั่นคือด้วยแรงดันไฟฟ้าสูงสุดในการทำงานอย่างน้อย 400 V) และกระแสสูงสุด 25-50 A ด้วยการสตาร์ทเครื่องยนต์อย่างราบรื่นกระแสสตาร์ท ไม่เกินอัตราที่กำหนด จำเป็นต้องสำรองเฉพาะในกรณีที่เครื่องมือติดขัดเท่านั้น
อุปกรณ์ได้รับการทดสอบกับเครื่องมือไฟฟ้าที่มีกำลังสูงถึง 2.2 กิโลวัตต์ เนื่องจากตัวควบคุม DA1 ช่วยให้มั่นใจได้ถึงการไหลของกระแสในวงจรอิเล็กโทรดควบคุมของ triac VS1 ในระหว่างส่วนที่แอคทีฟทั้งหมดของครึ่งรอบ จึงไม่มีข้อจำกัดเกี่ยวกับกำลังโหลดขั้นต่ำ ผู้เขียนยังเชื่อมต่อเครื่องโกนหนวดไฟฟ้าคาร์คอฟเข้ากับอุปกรณ์ที่ผลิตด้วย
K. Moroz, Nadym, Yamal-Nenets Autonomous Okrug
วรรณกรรม
1. Biryukov S. สตาร์ทมอเตอร์ไฟฟ้าแบบสับเปลี่ยนอัตโนมัติ - วิทยุ 1997, N* 8. หน้า 40 42
2. Nemich A. Microcircuit KR1182PM1 - ตัวควบคุมกำลังเฟส - วิทยุ 1999, N "7, p. 44-46.
นอกเหนือจากข้อดีที่ชัดเจนแล้ว มอเตอร์ไฟฟ้าแบบอะซิงโครนัสยังมีข้อเสียที่สำคัญสองประการ - กระแสสตาร์ทขนาดใหญ่ (มากกว่ากระแสไฟที่กำหนดสูงสุดเจ็ดเท่า) และการกระตุกเมื่อสตาร์ท ข้อบกพร่องเหล่านี้ส่งผลเสียต่อสภาพของเครือข่ายไฟฟ้า จำเป็นต้องใช้เบรกเกอร์วงจรที่มีลักษณะกระแสเวลาที่เหมาะสม และสร้างโหลดไดนามิกที่สำคัญบนอุปกรณ์
ทุกคนคุ้นเคยกับผลของการสตาร์ทมอเตอร์อะซิงโครนัสอันทรงพลัง: “แรงดันไฟฟ้าตกและทุกสิ่งรอบๆ มอเตอร์ไฟฟ้าสั่น ดังนั้น เพื่อลดผลกระทบด้านลบ จึงได้มีการพัฒนาวิธีการและแผนงานเพื่อลดการกระตุกและทำให้สตาร์ทมอเตอร์แบบอะซิงโครนัสด้วยโรเตอร์แบบกรงกระรอกได้นุ่มนวลยิ่งขึ้น
วิธีการสตาร์ทมอเตอร์อะซิงโครนัสอย่างราบรื่น
นอกจากผลกระทบด้านลบต่อวงจรไฟฟ้าและสิ่งแวดล้อมแล้ว แรงกระตุ้นสตาร์ทของมอเตอร์ไฟฟ้ายังเป็นอันตรายต่อขดลวดสเตเตอร์ด้วย เนื่องจากมีการใช้โมเมนต์ของแรงที่เพิ่มขึ้นในระหว่างการสตาร์ทกับขดลวด นั่นคือแรงกระตุกของโรเตอร์ทำให้เกิดแรงกดดันอย่างมากต่อสายไฟที่คดเคี้ยวซึ่งจะช่วยเร่งการสึกหรอของฉนวนซึ่งการสลายตัวเรียกว่าการลัดวงจรระหว่างกัน
 ภาพประกอบหลักการทำงานของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส
ภาพประกอบหลักการทำงานของมอเตอร์ไฟฟ้าแบบอะซิงโครนัส เนื่องจากเป็นไปไม่ได้ในเชิงโครงสร้างที่จะลดกระแสสตาร์ท จึงมีการคิดค้นวิธี วงจร และอุปกรณ์ที่ให้มา เริ่มต้นได้อย่างราบรื่นมอเตอร์แบบอะซิงโครนัส ในกรณีส่วนใหญ่ ในอุตสาหกรรมที่มีสายไฟทรงพลังและในชีวิตประจำวัน ตัวเลือกนี้ไม่บังคับ เนื่องจากความผันผวนของแรงดันไฟฟ้าและการสั่นสะเทือนเริ่มต้นไม่มีผลกระทบอย่างมีนัยสำคัญต่อกระบวนการผลิต
 กราฟการเปลี่ยนแปลงปัจจุบันระหว่างการสตาร์ทโดยตรงและการใช้ซอฟต์สตาร์ทเตอร์
กราฟการเปลี่ยนแปลงปัจจุบันระหว่างการสตาร์ทโดยตรงและการใช้ซอฟต์สตาร์ทเตอร์ แต่มีเทคโนโลยีที่ต้องการความเสถียรไม่เกินพารามิเตอร์มาตรฐานทั้งแหล่งจ่ายไฟและโหลดแบบไดนามิก ตัวอย่างเช่น นี่อาจเป็นอุปกรณ์ที่มีความแม่นยำซึ่งทำงานบนเครือข่ายเดียวกันกับผู้ใช้ไฟฟ้าที่ไวต่อแรงดันไฟฟ้า ในกรณีนี้เพื่อให้เป็นไปตามมาตรฐานทางเทคโนโลยีสำหรับการสตาร์ทมอเตอร์ไฟฟ้าอย่างนุ่มนวลจึงใช้วิธีการต่างๆ:
- การสลับสตาร์เดลต้า;
- การเริ่มใช้ตัวแปลงอัตโนมัติ
- อุปกรณ์สตาร์ทมอเตอร์แบบอะซิงโครนัส (USM)
วิดีโอด้านล่างแสดงรายการปัญหาหลักที่เกิดขึ้นเมื่อสตาร์ทมอเตอร์ไฟฟ้า และยังอธิบายข้อดีและข้อเสียของซอฟต์สตาร์ทเตอร์ต่างๆ สำหรับมอเตอร์ไฟฟ้าแบบอะซิงโครนัสกรงกระรอก
ในอีกทางหนึ่ง UPP เรียกอีกอย่างว่าซอฟต์สตาร์ทเตอร์จากภาษาอังกฤษว่า "soft" - soft ด้านล่างนี้เราจะอธิบายโดยย่อเกี่ยวกับประเภทและตัวเลือกที่มีให้ในซอฟต์สตาร์ทเตอร์ที่ใช้กันอย่างแพร่หลาย คุณยังสามารถทำความคุ้นเคยกับวัสดุเพิ่มเติมเกี่ยวกับซอฟต์สตาร์ทเตอร์ได้ด้วย
 ซอฟต์สตาร์ทเตอร์อุตสาหกรรมสำหรับมอเตอร์ไฟฟ้ากำลังต่างๆ
ซอฟต์สตาร์ทเตอร์อุตสาหกรรมสำหรับมอเตอร์ไฟฟ้ากำลังต่างๆ รู้เบื้องต้นเกี่ยวกับหลักการซอฟต์สตาร์ท
เพื่อให้สตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสได้อย่างราบรื่นอย่างมีประสิทธิภาพที่สุดเท่าที่จะเป็นไปได้และด้วยต้นทุนที่ต่ำที่สุดโดยการซื้อซอฟต์สตาร์ทเตอร์สำเร็จรูป คุณต้องทำความคุ้นเคยกับหลักการทำงานของอุปกรณ์และวงจรดังกล่าวก่อน การทำความเข้าใจปฏิสัมพันธ์ของพารามิเตอร์ทางกายภาพจะช่วยให้คุณสามารถเลือกชุดซอฟต์สตาร์ทได้อย่างเหมาะสมที่สุด
การใช้ซอฟต์สตาร์ทเตอร์ สามารถลดกระแสสตาร์ทเป็นค่าสามเท่าของค่าพิกัดได้ (แทนที่จะโอเวอร์โหลดเจ็ดเท่า)
จำเป็นต้องมีการสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสอย่างราบรื่น ลดกระแสสตาร์ทซึ่งจะส่งผลเชิงบวกต่อทั้งโหลดบนเครือข่ายไฟฟ้าและการโอเวอร์โหลดแบบไดนามิกของขดลวดมอเตอร์และกลไกขับเคลื่อน สามารถลดกระแสสตาร์ทได้โดยการลดแรงดันไฟฟ้าของมอเตอร์ไฟฟ้า แรงดันไฟฟ้าเริ่มต้นที่ลดลงนั้นใช้ในทั้งสามวิธีที่เสนอข้างต้น ตัวอย่างเช่น เมื่อใช้ตัวแปลงอัตโนมัติ ผู้ใช้จะลดแรงดันไฟฟ้าเมื่อเริ่มต้นอย่างอิสระโดยหมุนแถบเลื่อน
 ด้วยการลดแรงดันไฟฟ้าตอนสตาร์ท คุณสามารถสตาร์ทมอเตอร์ไฟฟ้าได้อย่างราบรื่น
ด้วยการลดแรงดันไฟฟ้าตอนสตาร์ท คุณสามารถสตาร์ทมอเตอร์ไฟฟ้าได้อย่างราบรื่น เมื่อใช้สวิตช์สตาร์-เดลต้า แรงดันไฟฟ้าสายบนขดลวดมอเตอร์จะเปลี่ยนไป การสลับทำได้โดยใช้คอนแทคเตอร์และรีเลย์เวลาที่ออกแบบมาสำหรับเวลาที่มอเตอร์ไฟฟ้าสตาร์ท คำอธิบายโดยละเอียดเกี่ยวกับการสตาร์ทแบบนุ่มนวลของมอเตอร์ไฟฟ้าแบบอะซิงโครนัสพร้อมความช่วยเหลือมีอยู่ในแหล่งข้อมูลนี้ที่ลิงค์ที่ระบุ
 วงจรสวิตชิ่งสตาร์เดลต้าโดยใช้คอนแทคเตอร์และรีเลย์เวลา
วงจรสวิตชิ่งสตาร์เดลต้าโดยใช้คอนแทคเตอร์และรีเลย์เวลา ทฤษฎีการเริ่มต้นอย่างนุ่มนวล
เพื่อให้เข้าใจหลักการของการสตาร์ทอย่างราบรื่น จำเป็นต้องเข้าใจกฎการอนุรักษ์พลังงานที่จำเป็นในการหมุนเพลาโรเตอร์ของมอเตอร์ไฟฟ้า ด้วยวิธีง่ายๆ เราสามารถพิจารณาพลังงานความเร่งให้เป็นสัดส่วนกับกำลังและเวลา E = P*t โดยที่ P คือกำลังเท่ากับกระแสคูณด้วยแรงดันไฟฟ้า (P = U*I) ดังนั้น E = U*I *t เนื่องจากเพื่อลดแรงบิดเริ่มต้นและลดภาระบนเครือข่ายจำเป็นต้องลดกระแสเริ่มต้น I จากนั้นในขณะที่รักษาระดับพลังงานที่ใช้ไปก็จำเป็นต้องเพิ่มเวลาเร่งความเร็ว
การเพิ่มเวลาเร่งความเร็วโดยการลดกระแสสตาร์ททำได้เฉพาะเมื่อมีภาระบนเพลาเพียงเล็กน้อยเท่านั้น นี่เป็นข้อเสียเปรียบหลักของ UPP ทั้งหมด
ดังนั้นสำหรับอุปกรณ์ที่มีสภาวะสตาร์ทยาก (รับน้ำหนักมากบนเพลาระหว่างสตาร์ท) จะใช้มอเตอร์ไฟฟ้าพิเศษที่มีโรเตอร์แบบพันแผล คุณสามารถเรียนรู้เกี่ยวกับคุณสมบัติของเอ็นจิ้นเหล่านี้ได้จากส่วนที่เกี่ยวข้องในแหล่งข้อมูลนี้โดยไปที่ลิงก์
 มอเตอร์ที่มีโรเตอร์แบบเฟสิก จำเป็นสำหรับอุปกรณ์ที่ใช้งานหนัก
มอเตอร์ที่มีโรเตอร์แบบเฟสิก จำเป็นสำหรับอุปกรณ์ที่ใช้งานหนัก นอกจากนี้ยังจำเป็นต้องคำนึงถึงว่าในระหว่างการสตาร์ทแบบนุ่มนวลความร้อนที่เพิ่มขึ้นของขดลวดและสวิตช์ไฟอิเล็กทรอนิกส์ของอุปกรณ์สตาร์ทจะเกิดขึ้น ในการระบายความร้อนให้กับสวิตช์เซมิคอนดักเตอร์จำเป็นต้องใช้หม้อน้ำขนาดใหญ่ซึ่งจะทำให้ต้นทุนของอุปกรณ์เพิ่มขึ้น ดังนั้นจึงเหมาะสมที่จะใช้ซอฟต์สตาร์ทเตอร์สำหรับการเร่งความเร็วเครื่องยนต์ในระยะสั้นโดยบายพาสสวิตช์เพิ่มเติมด้วยแรงดันไฟหลักโดยตรง โหมดที่คล้ายกัน ( การสลับบายพาส) ทำให้อุปกรณ์สตาร์ทแบบนุ่มนวลแบบอิเล็กทรอนิกส์สำหรับมอเตอร์อะซิงโครนัสมีขนาดกะทัดรัดและราคาถูกกว่า แต่จำกัดจำนวนการสตาร์ทในช่วงเวลาหนึ่งเนื่องจากต้องใช้เวลาในการระบายความร้อนของปุ่ม
 แผนภาพบล็อกของสวิตช์เซมิคอนดักเตอร์กำลังแบ่ง (บายพาส)
แผนภาพบล็อกของสวิตช์เซมิคอนดักเตอร์กำลังแบ่ง (บายพาส) พารามิเตอร์หลักและคุณลักษณะของซอฟต์สตาร์ทเตอร์
ด้านล่างในข้อความจะมีไดอะแกรมของอุปกรณ์สตาร์ทแบบนุ่มนวลสำหรับการศึกษาและการผลิตด้วยตนเอง สำหรับผู้ที่ไม่พร้อมที่จะสตาร์ทมอเตอร์ไฟฟ้าแบบอะซิงโครนัสแบบนุ่มนวลด้วยมือของตนเอง ข้อมูลเกี่ยวกับซอฟต์สตาร์ทเตอร์ประเภทต่างๆ ที่มีอยู่จะเป็นประโยชน์โดยอาศัยผลิตภัณฑ์สำเร็จรูป
 ตัวอย่างของซอฟต์สตาร์ทแบบแอนะล็อกและดิจิทัล ในการออกแบบโมดูลาร์ (ติดตั้งบนราง DIN)
ตัวอย่างของซอฟต์สตาร์ทแบบแอนะล็อกและดิจิทัล ในการออกแบบโมดูลาร์ (ติดตั้งบนราง DIN) หนึ่งในพารามิเตอร์หลักในการเลือกซอฟต์สตาร์ทเตอร์คือกำลังของมอเตอร์ไฟฟ้าที่ให้บริการ ซึ่งแสดงเป็นกิโลวัตต์ สิ่งสำคัญไม่แพ้กันคือเวลาเร่งความเร็วและความสามารถในการปรับช่วงเวลาเริ่มต้น ชุดซอฟต์สตาร์ทที่มีอยู่ทั้งหมดมีลักษณะเฉพาะเหล่านี้ ซอฟต์สตาร์ทเตอร์ขั้นสูงเพิ่มเติมเป็นแบบสากลและช่วยให้คุณสามารถกำหนดค่าพารามิเตอร์ซอฟต์สตาร์ทในค่าที่หลากหลายซึ่งสัมพันธ์กับคุณลักษณะของเครื่องยนต์และข้อกำหนดของกระบวนการ
 ตัวอย่างของ universal softstarter
ตัวอย่างของ universal softstarter อาจมีตัวเลือกต่าง ๆ ที่เพิ่มการทำงานของอุปกรณ์และช่วยให้คุณควบคุมการทำงานของมอเตอร์ไฟฟ้าทั้งนี้ขึ้นอยู่กับประเภทของซอฟต์สตาร์ทเตอร์ ตัวอย่างเช่น ด้วยความช่วยเหลือของซอฟต์สตาร์ทเตอร์ ไม่เพียงแต่จะสตาร์ทมอเตอร์ไฟฟ้าได้อย่างราบรื่น แต่ยังรวมถึงการเบรกด้วย ซอฟต์สตาร์ทเตอร์ขั้นสูงเพิ่มเติมดำเนินการ ปกป้องเครื่องยนต์จากการโอเวอร์โหลด และยังช่วยให้คุณปรับแรงบิดของโรเตอร์ในระหว่างการสตาร์ท หยุด และการทำงานได้อีกด้วย
 ตัวอย่างความแตกต่างในลักษณะทางเทคนิคของซอฟต์สตาร์ทเตอร์ที่ต่างกันจากผู้ผลิตรายเดียวกัน
ตัวอย่างความแตกต่างในลักษณะทางเทคนิคของซอฟต์สตาร์ทเตอร์ที่ต่างกันจากผู้ผลิตรายเดียวกัน ประเภทของซอฟต์สตาร์ทเตอร์
ตามวิธีการเชื่อมต่อ ซอฟต์สตาร์ทเตอร์แบ่งออกเป็นสามประเภท:

SCP ที่ทำเอง
สำหรับการผลิตซอฟต์สตาร์ทด้วยตนเอง วงจรซอฟต์สตาร์ทที่ต้องทำด้วยตัวเองสำหรับมอเตอร์อะซิงโครนัสจะขึ้นอยู่กับความสามารถและทักษะของช่างฝีมือ การบรรเทาปัญหาการเริ่มต้นโอเวอร์โหลดโดยอิสระโดยใช้ตัวแปลงอัตโนมัตินั้นมีให้สำหรับผู้ใช้เกือบทุกคนที่ไม่มีความรู้พิเศษ แต่วิธีนี้ไม่สะดวกเนื่องจากจำเป็นต้องปรับการสตาร์ทมอเตอร์ไฟฟ้าด้วยตนเอง ลดราคา คุณจะพบอุปกรณ์ซอฟต์สตาร์ทราคาไม่แพงซึ่งคุณจะต้องเชื่อมต่อกับเครื่องมือไฟฟ้าด้วยตัวเอง โดยไม่ต้องมีความรู้เชิงลึกเกี่ยวกับวิศวกรรมวิทยุ ตัวอย่างงานก่อนและหลังซอฟต์สตาร์ทเตอร์รวมถึงการเชื่อมต่อแสดงอยู่ในวิดีโอด้านล่าง:
สำหรับช่างฝีมือที่มีความรู้ทั่วไปเกี่ยวกับวิศวกรรมไฟฟ้าและทักษะการติดตั้งระบบไฟฟ้าที่ใช้งานได้จริง วงจรสวิตชิ่งแบบสตาร์-เดลต้าเหมาะสำหรับการสตาร์ทอย่างราบรื่นด้วยมือของตนเอง แผนการเหล่านี้แม้จะอายุมากแล้ว แต่ก็ยังแพร่หลายและถูกนำมาใช้อย่างประสบความสำเร็จจนถึงทุกวันนี้เนื่องจากความเรียบง่ายและความน่าเชื่อถือ คุณสามารถค้นหาไดอะแกรม SCP บนอินเทอร์เน็ตเพื่อทำซ้ำด้วยมือของคุณเองทั้งนี้ขึ้นอยู่กับคุณสมบัติของอาจารย์
 วงจรตัวอย่างของซอฟต์สตาร์ทเตอร์แบบสองเฟสที่ค่อนข้างง่าย
วงจรตัวอย่างของซอฟต์สตาร์ทเตอร์แบบสองเฟสที่ค่อนข้างง่าย ซอฟต์สตาร์ทเตอร์สมัยใหม่มีไส้อิเล็กทรอนิกส์ที่ซับซ้อนอยู่ภายในซึ่งประกอบด้วยชิ้นส่วนอิเล็กทรอนิกส์จำนวนมากที่ทำงานภายใต้การควบคุมของไมโครโปรเซสเซอร์ ดังนั้นเพื่อผลิตซอฟต์สตาร์ทเตอร์ที่คล้ายกัน ด้วยมือของคุณเองตามรูปแบบที่มีบนอินเทอร์เน็ตไม่เพียง แต่ต้องมีทักษะของนักวิทยุสมัครเล่นเท่านั้น แต่ยังต้องมีทักษะในการเขียนโปรแกรมไมโครคอนโทรลเลอร์ด้วย





